Inspired by our previous, fairly epic failure, we decided to embark on a more dramatic failure since it will be a few years before we have the opportunity to capture a total eclipse from the air again. This time around the thought/question was whether it might be possible to simplify down to a single all-in-1 android device and use it to perform all tasks including navigation to a target that it will choose based on its release location. Here’s how that could work:
It starts with a tiny android- anyone who knows me already knows of my distain for giant movie-screen sized phones. Besides the physics of a giant thin screen being more subject to damage, more awkward to carry in a pocket, and needlessly distracting, I just hate that there are almost no exceptions for people who don’t feel a need to be constantly looking at their phones or playing video games on them. Even the one I managed to acquire initially was sold ONLY as an accesssory phone- meaning you literally HAD to have another, larger phone on your account in order to even use a smaller one. Mind-bogglingly stupid, I know. Good job, Verizon! Anyway, turns out the policy has relaxed a bit and also you can quickly swamp your sim card (assuing you have two phones available for this workaround) to pair it up and then just have one little phone like a normal person. Anyway- so yes, this possibly cockamame plan starts with an PVG100 Palm. A tiny android which features a full array of gyros/sensors, GPS, dual cameras, and that android app versatility that we all love so much. After this week’s victorious servo experimentation I think the only two obstactles standing in the way are the diminutive 800mah battery and my complete unfamiliarity with coding anything for android. My friend, Rick suggested I read up on ‘Kotlin’ and so that’s what I’m doing.
The servo experiment was fun. The hypothesis was that it could be possible to not only somehow output a recognizable PWM signal from an android device that could drive an external servo, but also to draw enough power from the phone itself to drive the motor.
Turns out there is a way: There are a few resourceful folks out there who have discovered you can use an audio output to get close enough to a squarewave PWM signal that your servo can (maybe) recognize. You can then use your headphone jack to output two channels (L speaker & R speaker). Nice! Unfortunately like so many other trendy phones these days this palm has no 3.5mm jack. At first this was slightly disappointing because it works against the “absolute simplified” goal I’m pursuing here, but its a blessing in disguise, because the OTG adapter you have to use actually includes a tiny DAC (Digital to Analog Converter) built into the plug.
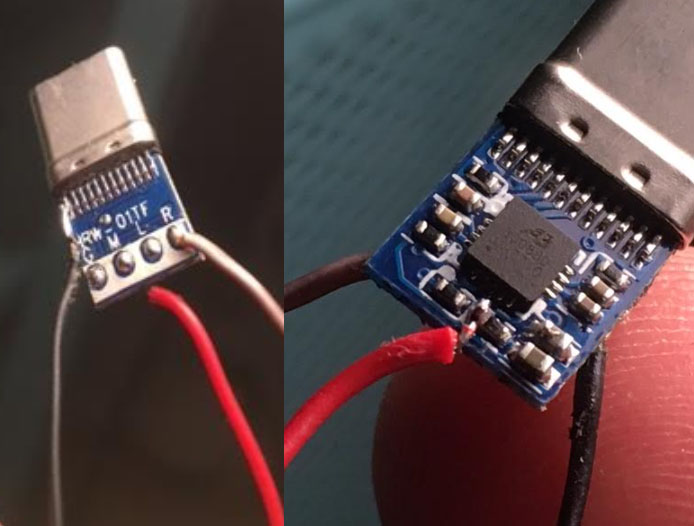
Of course there’s no reason to have a power output on an audio plug, so I got to cut it open to expose the PCB. Here, I had the opportunity to add a wire to extract 3.7v for the servo. Now this power output is likely meant for a logic level source so like less than 100ma or so. My first try with the generic project servo didn’t work for that very reason. Happily the actually servo I had in mind for this project is sub-micro, it’s the same one I hacked into a self-contained dropper mechanism for my DJI Mini2, and it takes barely any current and runs at 3.3v. This little hero of a servo is pretty ideal for this task and with a little luck will have enough torque to operate a small rudder.
So the master plan goes like this:
Send an ultralight glider capable of carrying this tiny phone, servo, and nothing else in the stratosphere then:
- Use cameras and sensors to document the trip up.
- Reference altitude/pressure and turn off cell antenna (also to make FCC happy)
- Use sensors to determine the point when the balloon pops.
- Activate rudder to release from tether string.
- Begin glide to level (I guess this will need to be passive, but its conceiveable I could add an elevator)
- Reference GPS coordinates for nearby Verizon towers from info in program.
- Compare with current GPS location.
- Reference magnetometer (compass) and adjust rudder to glide toward nearest available tower.
- Do the best gliding/documenting we can until we hit a target altitude and then turn cell antenna back on.
- Send position data and hopefully find my iphone.
- Depending on available battery- might try to upload sensor/media data to cloud in case this crashes in a lake or somewhere inaccessible, or gets run over, lands in an active volcano/whatever.
So that’s roughly the plan. I’m filing this under “in progress” for now, so wish me luck!
**AND please volunteer to help with programming if you can. I would absolutely LOVE some help in that area.
Here’s that demo glider being hoisted by my dropper Mini2 inside my converted trampoline/drone test cage (which is great now that I added a top to prevent flyaways, drones can bounce off the ground and get minimal if any damage..